Ice-detection and operation under ice
As Argo floats need to surface regularly to transmit data, the majority of the Argo fleet is restricted to sample only the ice-free ocean. Floats at high latitude may drift under ice at certain times of the year when sea ice forms. Traditionally, floats are unable to store data and would attempt to ascend to the surface, entering waters of freezing temperatures and potentially knocking the underside of the sea ice. This can lead to significant damage to sensors and antennae and reduce float lifespan.
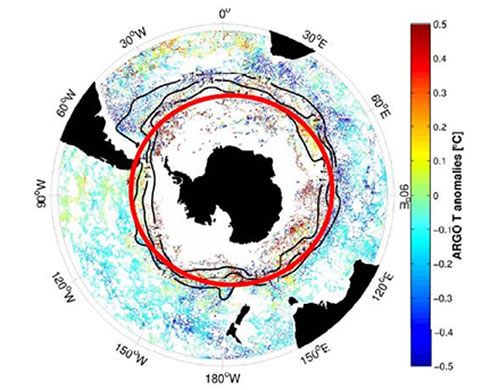
Temperature anomalies from the climatological mean, and Argo coverage of the Southern Ocean.
Therefore, floats deployed at higher latitudes that may encounter sea ice now have an ice sensing algorithm. This algorithm relates subsurface water temperatures to the probability of sea ice at the surface. When subsurface temperatures meet the specified threshold the float will abort its ascent and return to drift depth until another cycle has completed when it will attempt to ascend again.
To aid the effectiveness of using the ice-detection algorithm, near-surface sampling resolution has been increased and a precautionary synthetic protects the CTD sensor and antenna.
A more advanced feature that has been added to some floats is the ability in the instance of ice cover to store data collected during the aborted profile in delayed mode for transmission at a later date, although trajectory data accompanying these 'below ice' profiles would need to be interpolated.
Determining the position of floats beneath metres of ice is a challenge
beyond the reach of satellite positioning systems. However, one solution comes
in the form of the RAFOS acoustic
technology used in the past. The Alfred Wegner Institute has installed a small
array of acoustic sources in the Weddell Sea to successfully track floats below
the ice, and a larger array is planned.